弹簧质点系统
受力分析
弹簧指点系统遵循胡克定律&牛顿运动定律:
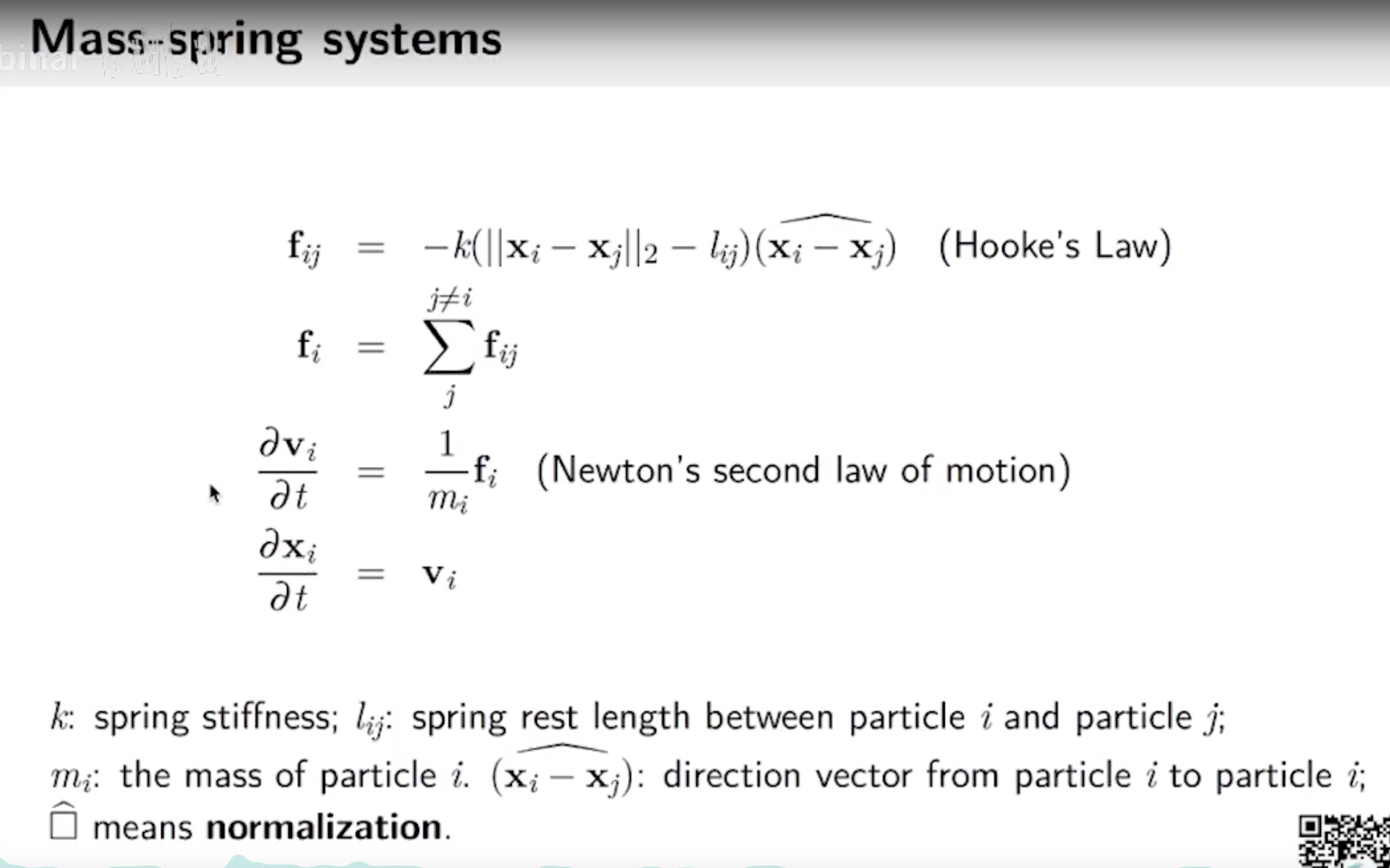
并不复杂(当然需要考虑重力)。
时间积分
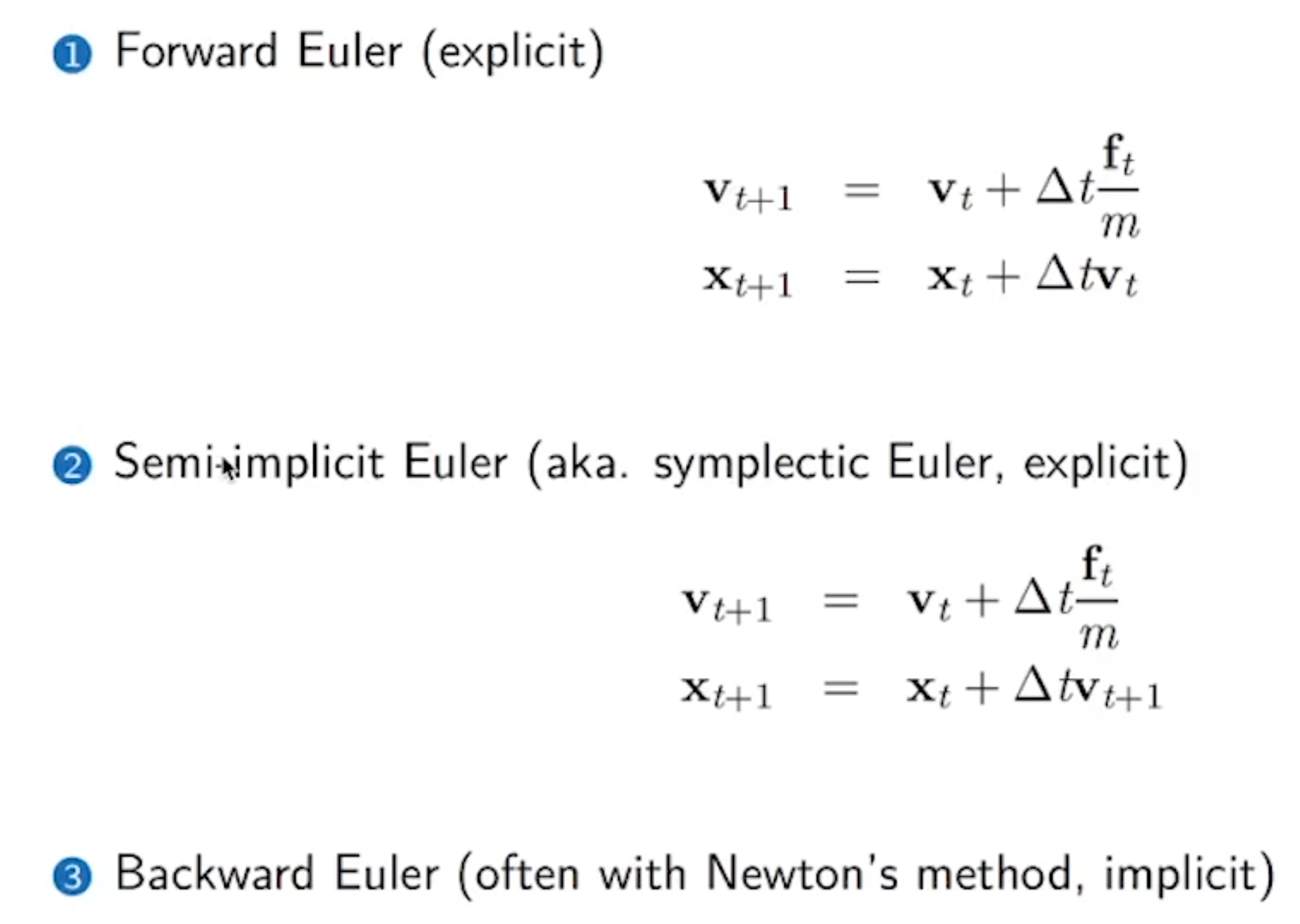
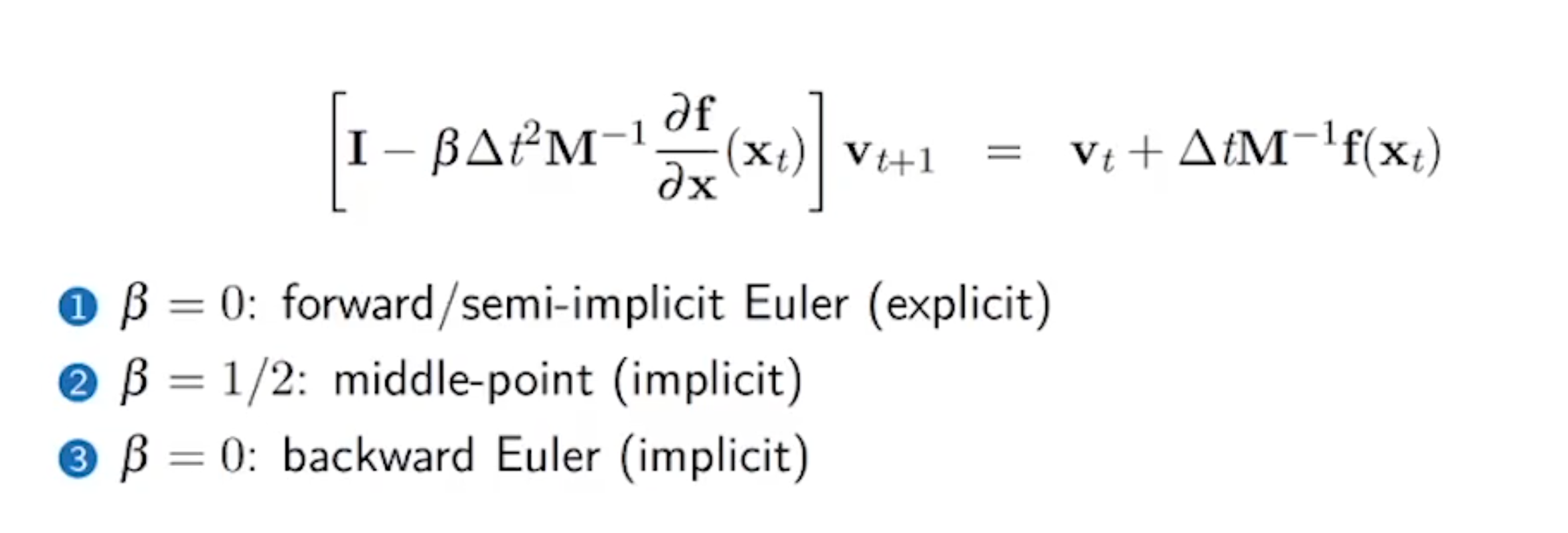
前向欧拉
通过当前的状态推测下一步的状态
- 通过当前的受力分析计算加速度,推断下一步的速度( )
- 通过当前的速度计算下一步的位移
半隐式欧拉 (AKA. Symplectic Euler 对偶欧拉)
- 通过当前的受力分析计算加速度,推断下一步的速度( )(和上面一样)
- 用计算出来的新速度计算下一步的位移
实现的时候,在更新计算和地面的碰撞的时候,更新位置之前首先计算和地面的碰撞(pos.y<bottom_height?),如果碰撞的,把速度设置为0。
上面两种都是显式时间积分器,问题在于对步长有限制,不可太大,否则容易爆炸:
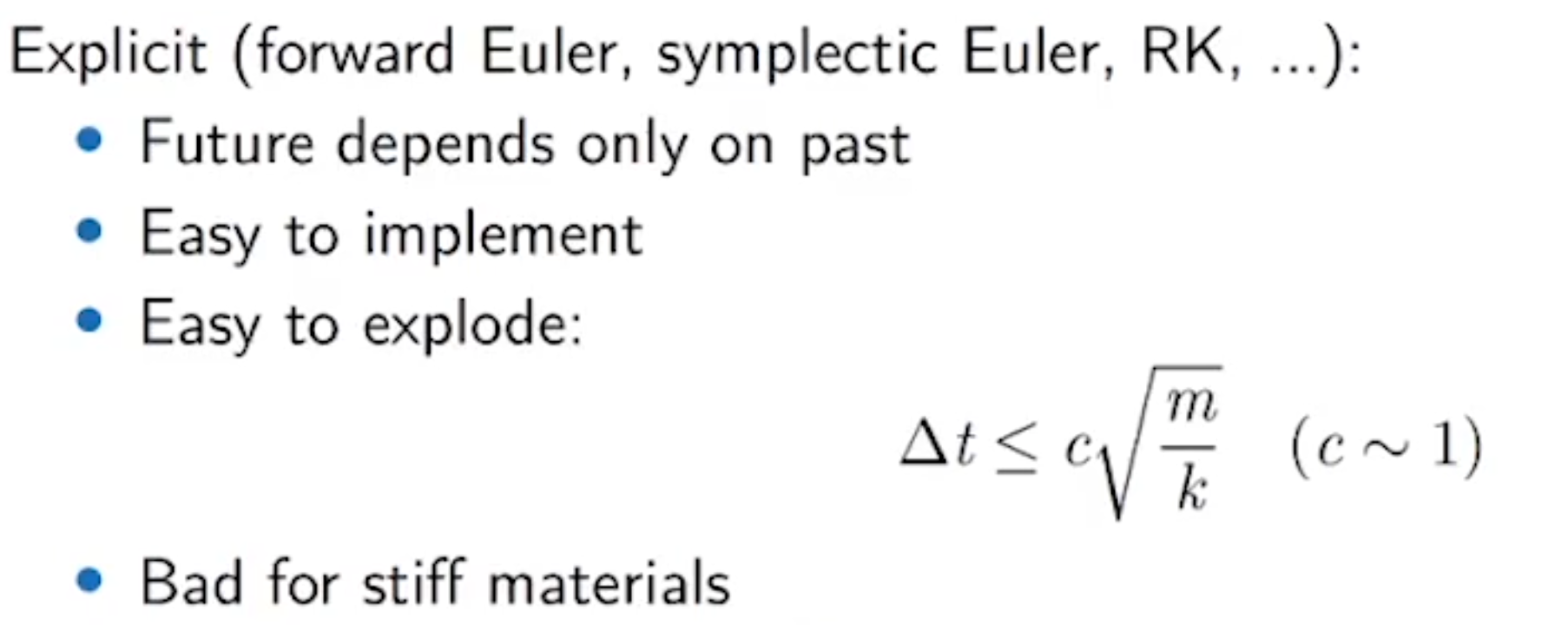
这个公式的原因是:超过了Nyquist采样频率(TODO 找一些文献)
后向欧拉
隐式时间积分不止这一种,还有Middle-Point之类。
缺点:
- 难以实现,难以优化
- 每一步都会变得更加昂贵
优点:
- 可以容忍更加大的步长
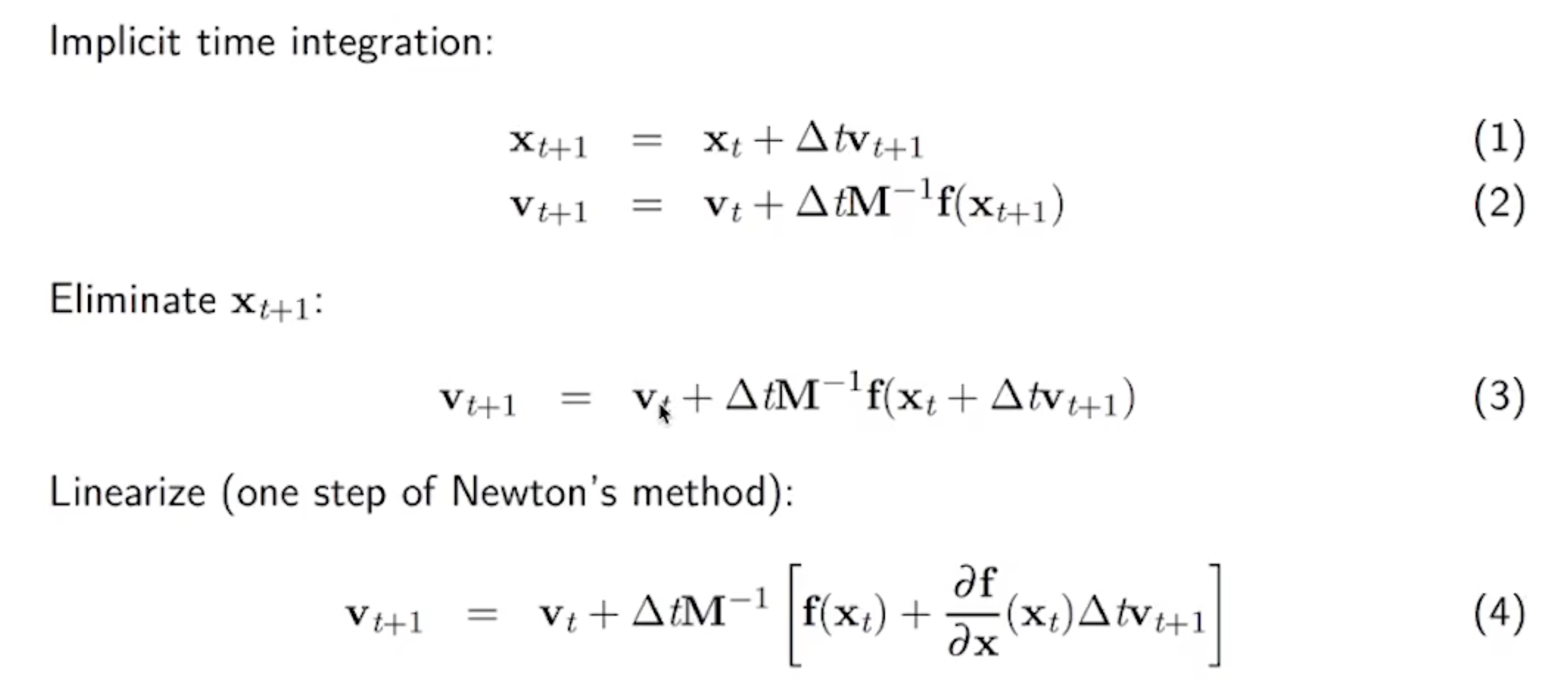
可以看到,1和2互相依赖,所以代入求解:
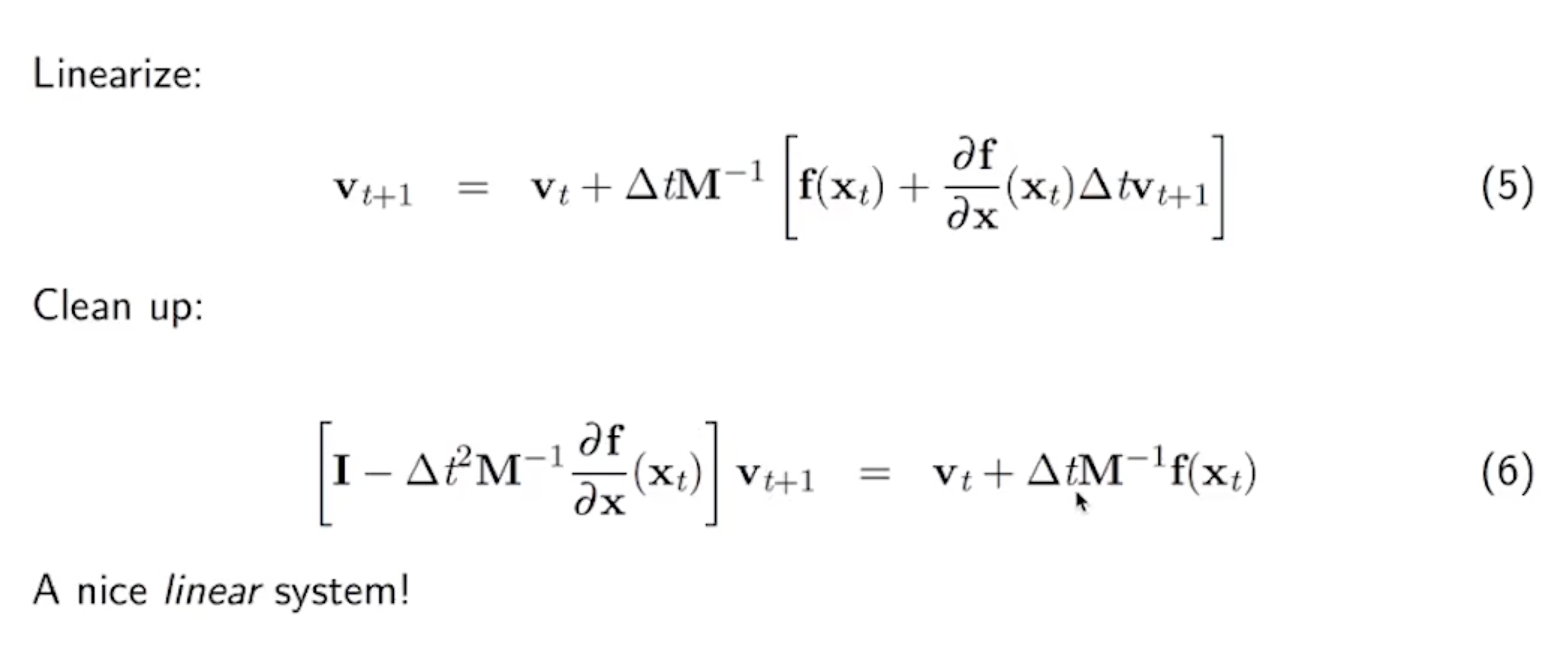
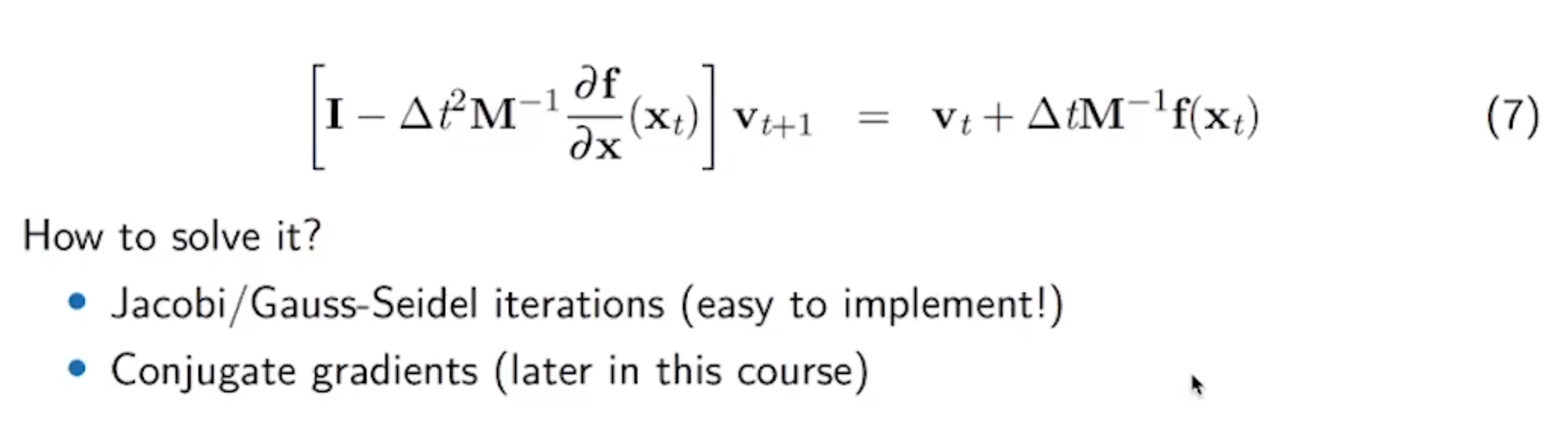
按照道理说,求逆矩阵是最好的,但是时间复杂度不可接受,所以我们用雅可比迭代之类的方法替代:
雅可比迭代的一个实现:
@ti.kernel
def iterate():
for i in range(n):
r = b[i]
for j in range(n):
if i != j:
r -= A[i, j] * x[j]
new_x[i] = r / A[i, i]
for i in range(n):
x[i] = new_x[i]
但是雅可比迭代使用有限制,只能收敛一些性质比较好的矩阵,对谱半径有一些要求。
使用共轭梯度的话就会更快一点。
从这里就可以看出来不同求解器的区别和联系:
大规模求解器
(仅仅是索引)